Wenhao Ding (丁文浩)
Email: wenhaod AT nvidia DOT com
My research centers on the reasoning capabilities of physical autonomous systems, with a current emphasis on autonomous vehicles. I am currently interested in vision-language-action models, safety monitoring, and retrieval-augmented generation.
News & Updates
2026/03 - We release Alpamayo 1.5 to supercharging autonomous driving with interactive, steerable reasoning.
2025/11 - We release Alpamayo-R1 to integrate Chain of Causation reasoning for driving.
2025/09 - MPA is accepted to NeurIPS 2025.
2025/04 - CAT-K is accepted to CVPR 2025 as an oral paper.
2024/09 - Two papers about Offline RL are accepted to NeurIPS.
2024/08 - One paper about scenario generation is accepted to ECCV as an Oral paper.
2024/06 - I join NVIDIA Research as a Research Scientist at the Autonomous Vehicle Group.
2024/03 - One paper using causal-aware representation for driving is accepted to RA-L.
2024/02 - One paper about privacy in robotics is accepted to ICRA 2024.
2023/09 - One paper combining causality and robustness is accepted to NeurIPS 2023.
2023/04 - One paper about reward-conditioned offline RL accepted to ICML 2023.
2023/03 - We are hosting the Secure and Safe Autonomous Driving (SSAD) Workshop and Challenge at CVPR 2023!
2023/01 - One paper about embodied AI accepted to ICRA 2023.
2022/12 - My research is covered by CMU Engineering News Driving autonomy into the metaverse!
2022/10 - Glad to present our work about causal discovery in Wayve!
2022/09 - Two papers got accepted to NeurIPS 2022. See you in New Orleans!
2022/09 - One paper about using causal graph to generate safety-critical scenarios got accepted to CoRL 2022.
2022/08 - My research proposal wins 2022 Qualcomm Innovation Fellowship, North America.
2022/03 - I will start my Applied Scientist Intern in Amazon Lab126 working on Astro.
2022/02 - I gave a talk about scenario generation in Upenn hosted by Prof. Rahul Mangharam.
2022/01 - We are holding the Season Depth Challenge in IROS 2022 and ICRA 2022.
2022/01 - I gave a talk about scenario generation in Stanford SISL Lab.
Selected Publications

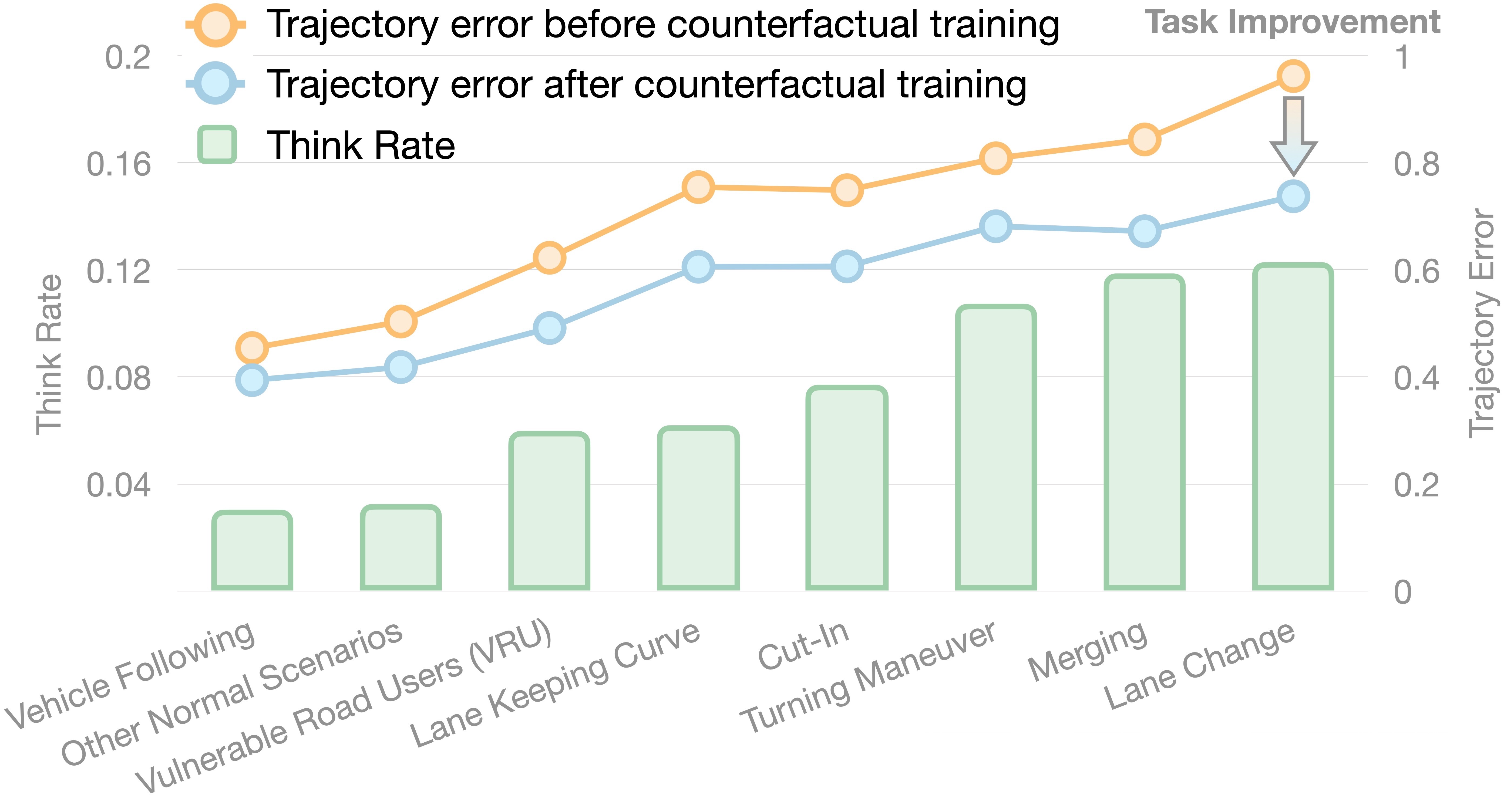
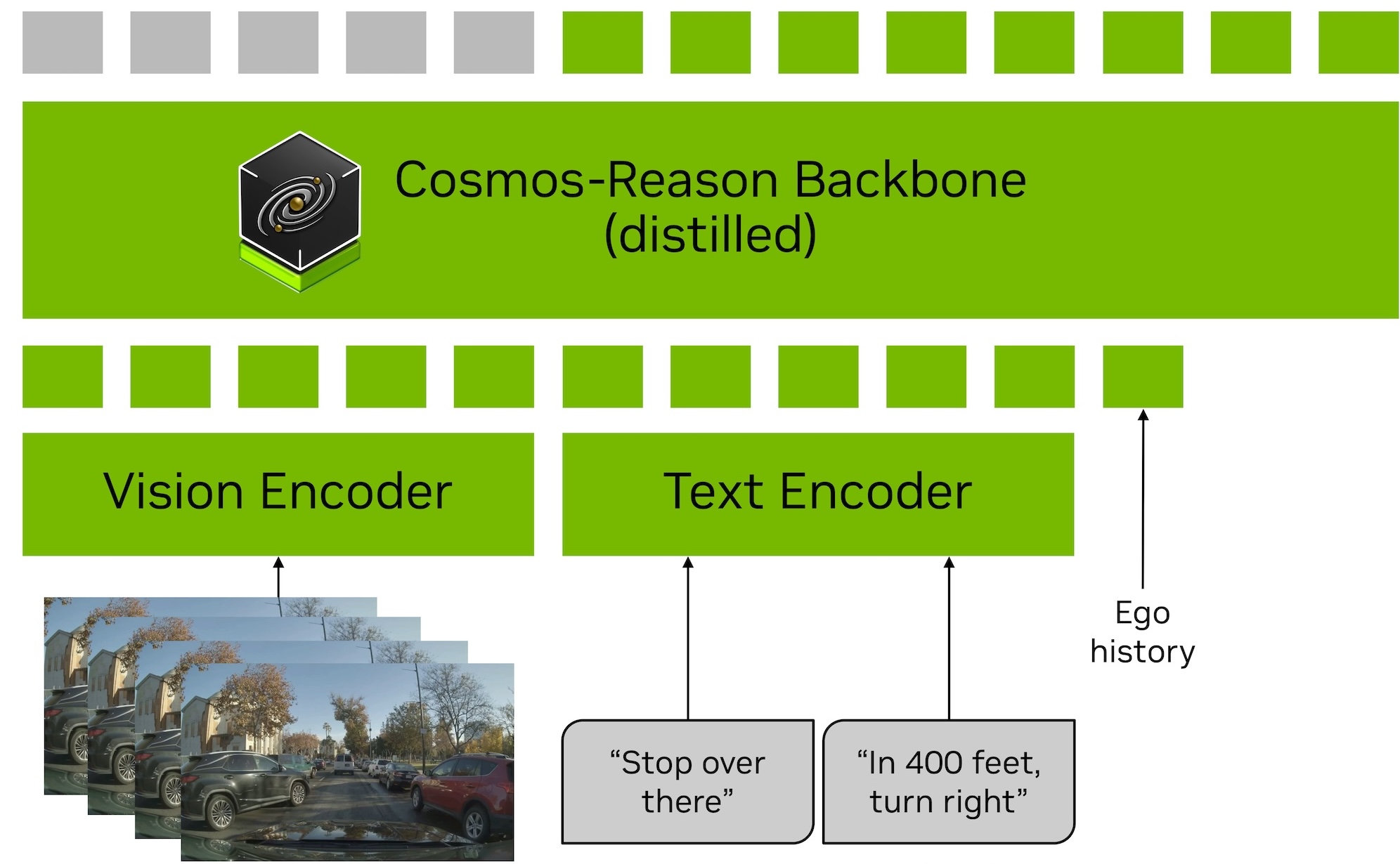
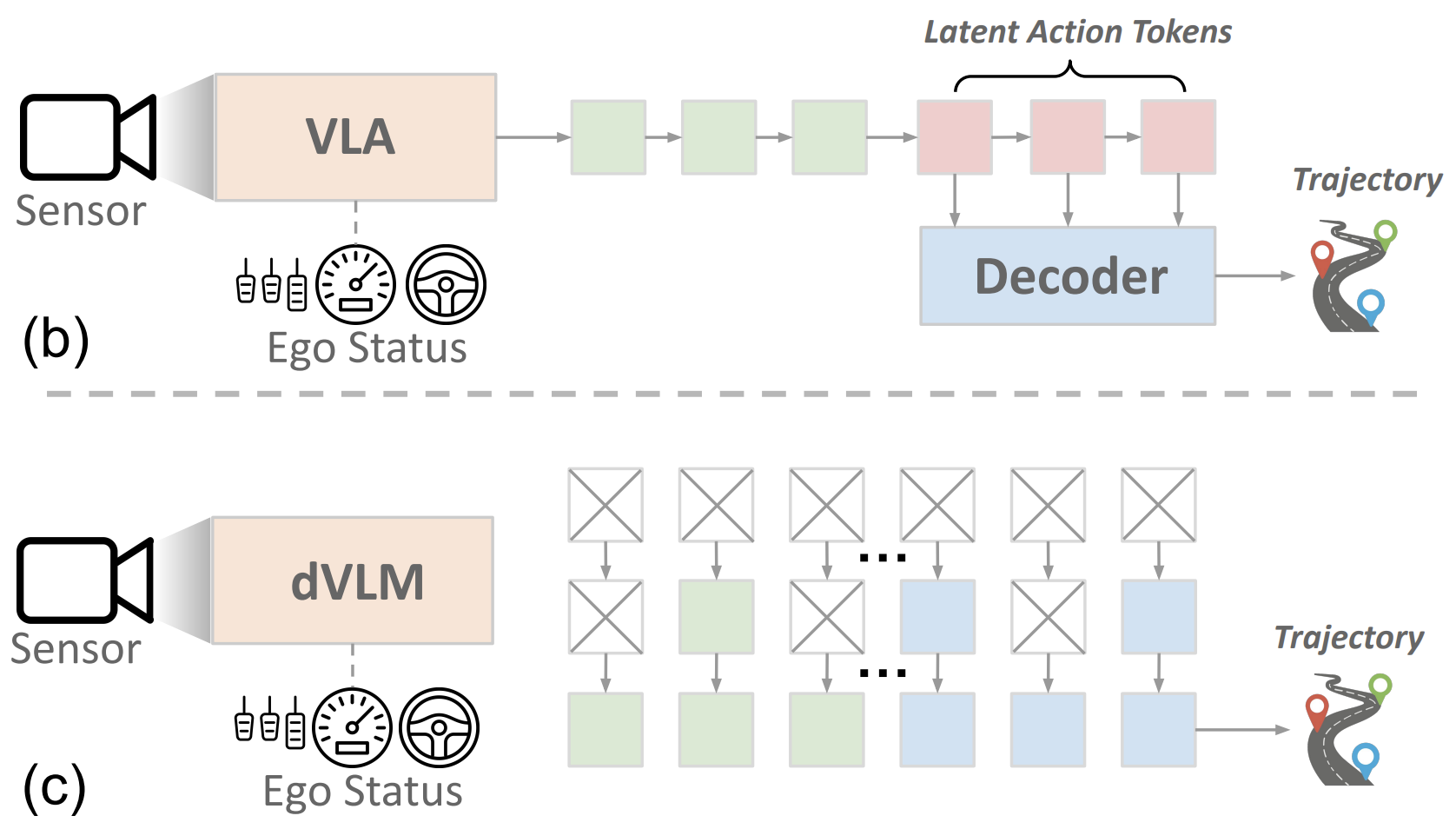
Counterfactual VLA: Self-Reflective Vision-Language-Action Model with Adaptive Reasoning
Zhenghao Peng,
Wenhao Ding,
Yurong You, Yuxiao Chen, Wenjie Luo, Thomas Tian, Yulong Cao, Apoorva Sharma, Danfei Xu, Boris Ivanovic, Boyi Li, Bolei Zhou, Yan Wang, Marco Pavone
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026
website / arXiv / bibtex
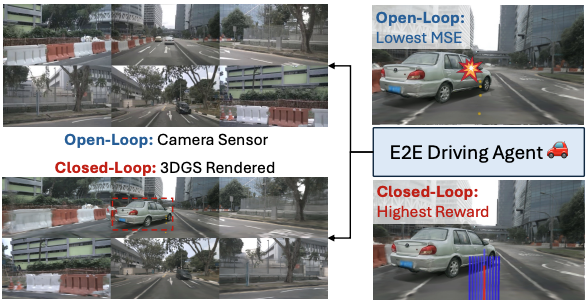
Model-Based Policy Adaptation for Closed-Loop End-to-End Autonomous Driving
Haohong Lin, Yunzhi Zhang,
Wenhao Ding,
Jiajun Wu, Ding Zhao
Conference on Neural Information Processing Systems (NeurIPS) 2025
website / pdf / code / bibtex
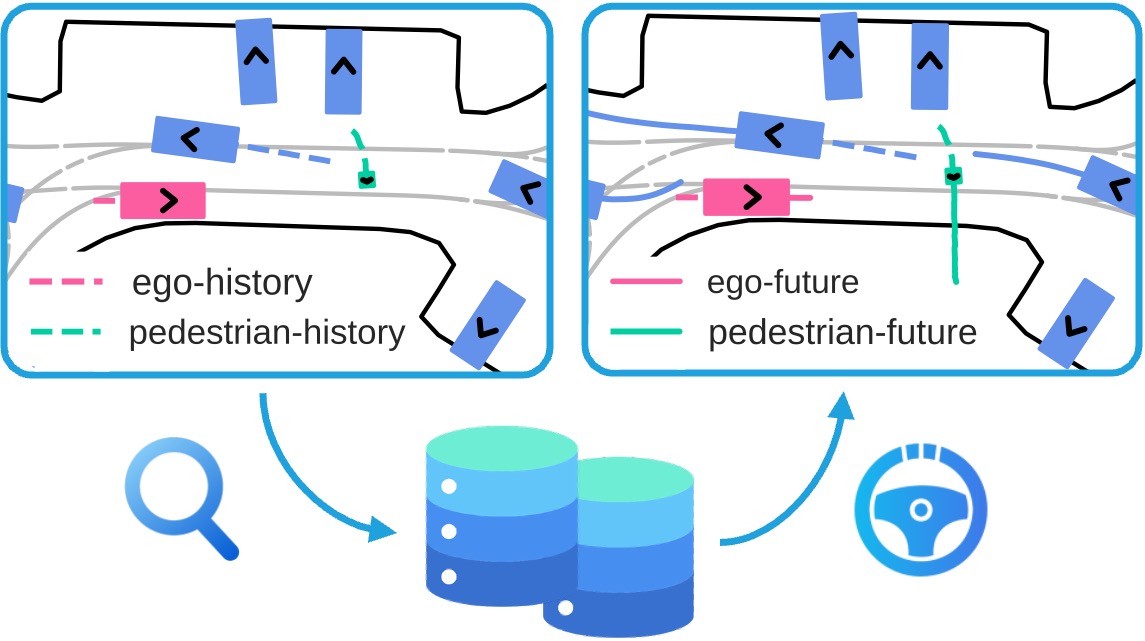
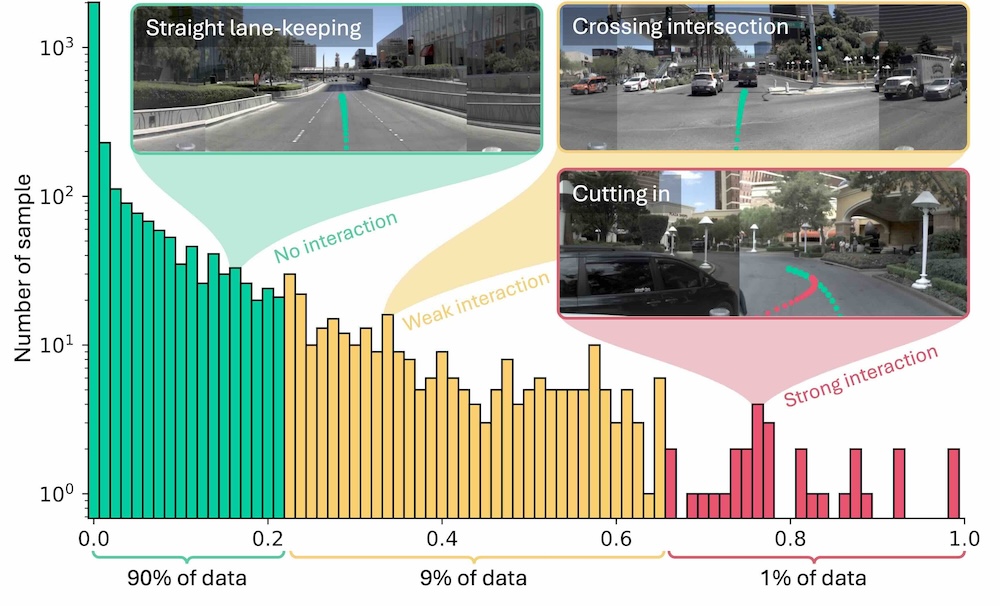
RealDrive: Retrieval-Augmented Driving with Diffusion Models
Wenhao Ding,
Sushant Veer, Yuxiao Chen, Yulong Cao, Chaowei Xiao, Marco Pavone
arXiv 2025
website / arXiv / code / bibtex
CrashAgent: Crash Scenario Generation via Multi-modal Reasoning
Miao Li,
Wenhao Ding,
Haohong Lin,
Yiqi Lyu,
Yihang Yao,
Yuyou Zhang,
Ding Zhao
arXiv 2025
website / arXiv / code / bibtex

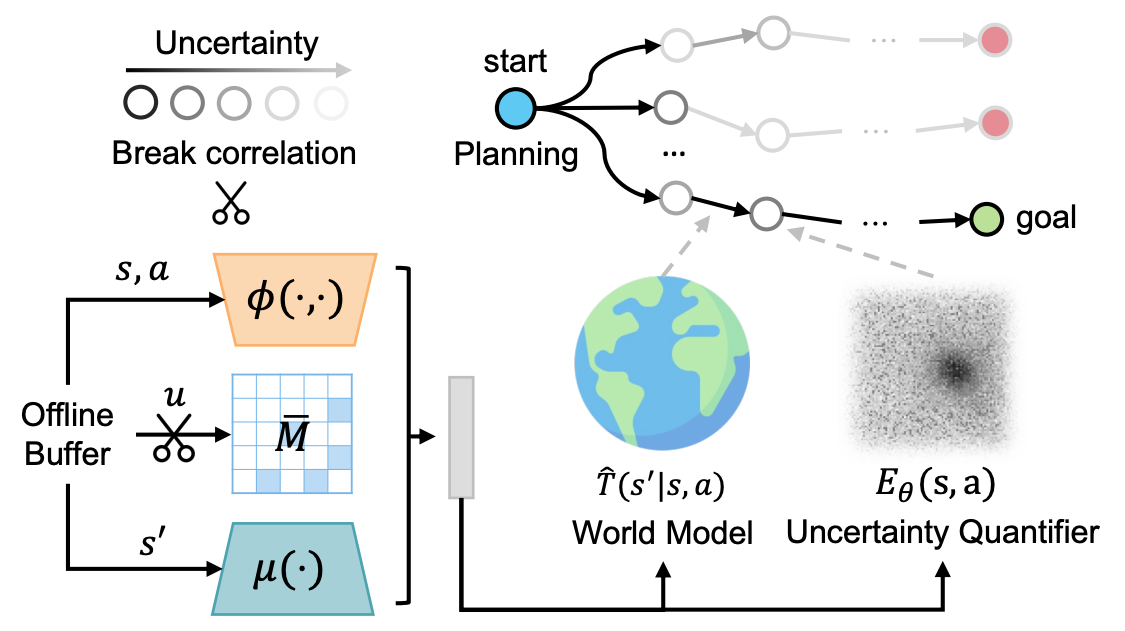
BECAUSE: Bilinear Causal Representation for Generalizable Offline Model-based Reinforcement Learning
Haohong Lin,
Wenhao Ding,
Jian Chen,
Laixi Shi,
Jiacheng Zhu,
Bo Li,
Ding Zhao
Conference on Neural Information Processing Systems (NeurIPS) 2024
website / arXiv / code / bibtex
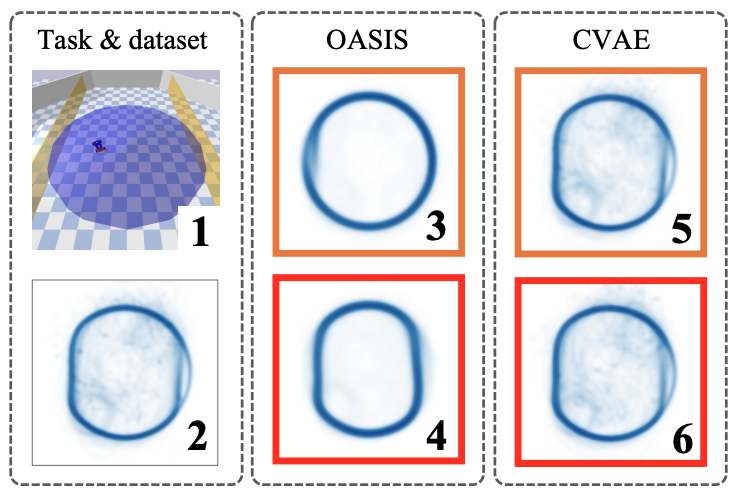
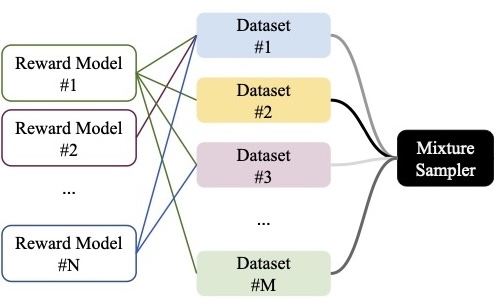
OASIS: Conditional Distribution Shaping for Offline Safe Reinforcement Learning
Yihang Yao*,
Zhepeng Cen*,
Wenhao Ding,
Haohong Lin,
Shiqi Liu,
Tingnan Zhang,
Wenhao Yu,
Ding Zhao
Conference on Neural Information Processing Systems (NeurIPS) 2024
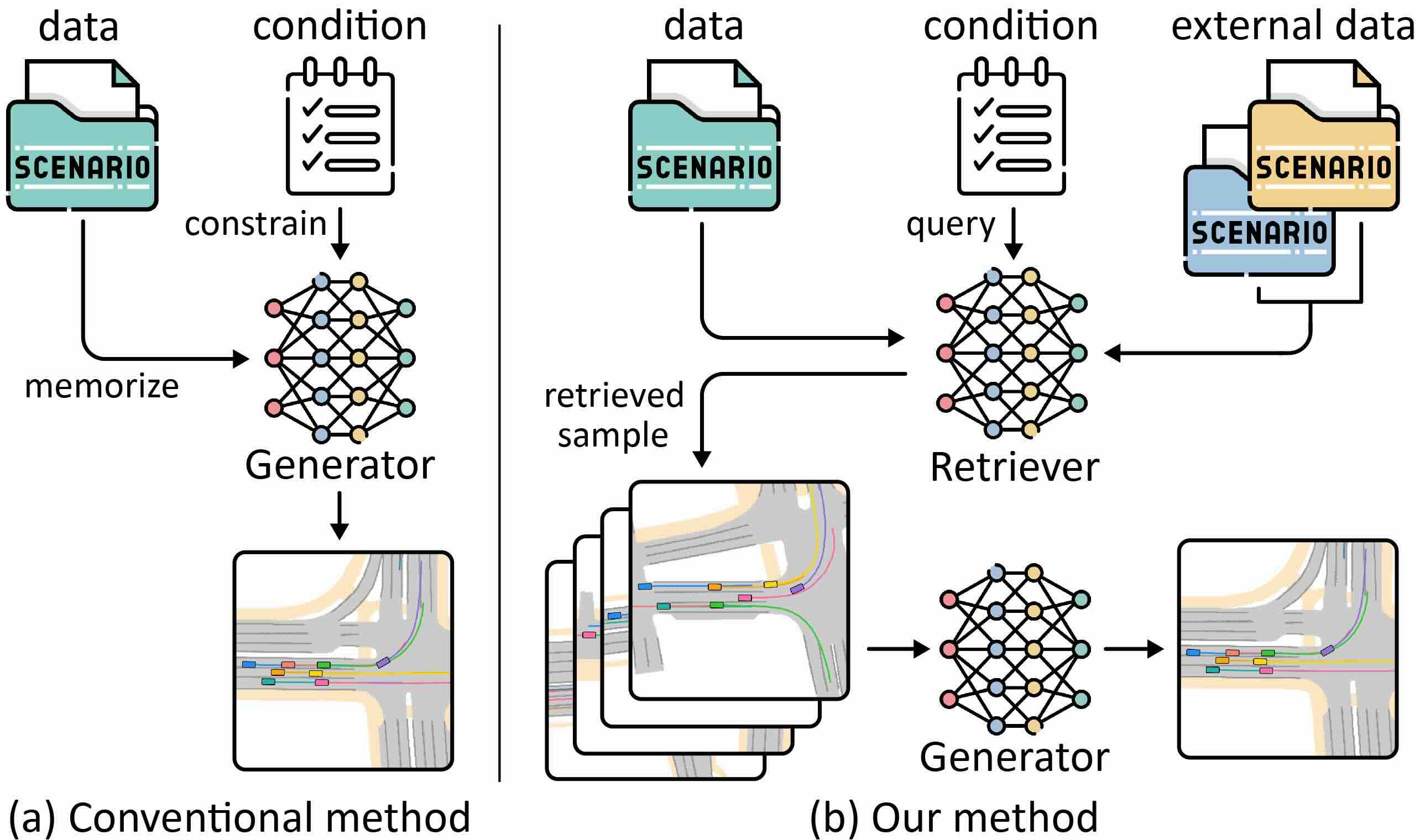
RealGen: Retrieval Augmented Generation for Controllable Traffic Scenarios
Wenhao Ding*,
Yulong Cao*,
Ding Zhao,
Chaowei Xiao,
Marco Pavone
(Oral) European Conference on Computer Vision (ECCV) 2024
Safety-aware Causal Representation for Trustworthy Reinforcement Learning in Autonomous Driving
Haohong Lin,
Wenhao Ding,
Zuxin Liu,
Yaru Niu,
Jiacheng Zhu,
Yuming Niu,
Ding Zhao
IEEE Robotics and Automation Letters (RA-L) 2024
Seeing is not Believing: Robust Reinforcement Learning against Spurious Correlation
Wenhao Ding*,
Laixi Shi*,
Yuejie Chi,
Ding Zhao
Conference on Neural Information Processing Systems (NeurIPS) 2023, New Orleans
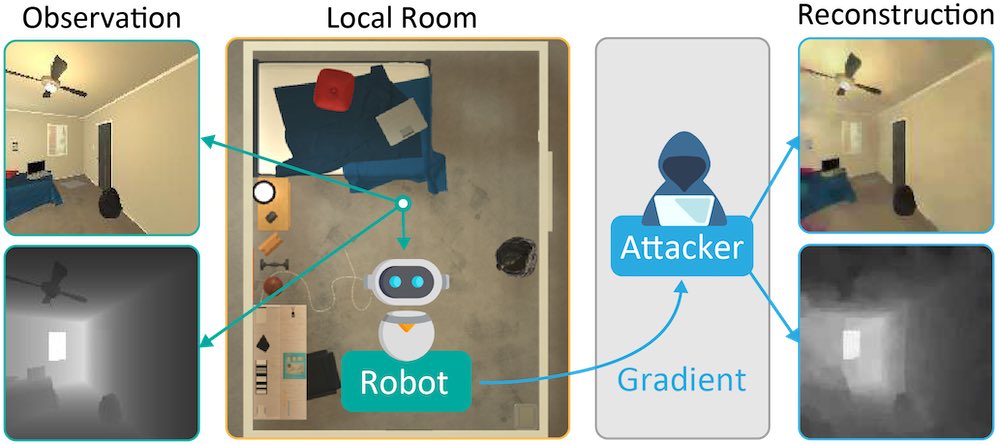
Your Room is not Private: Gradient Inversion Attack for Deep Q-Learning
Miao Li,
Wenhao Ding,
Ding Zhao
International Conference on Robotics and Automation (ICRA) 2024, Japan
arXiv / code / bibtex
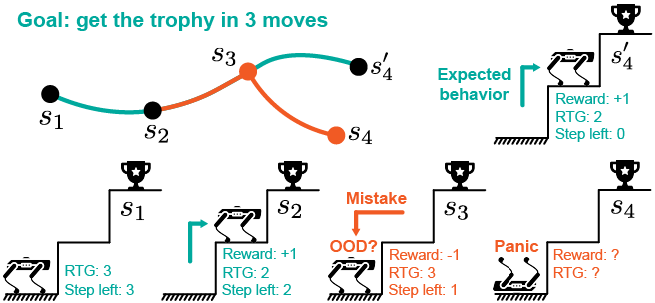
Bayesian Reparameterization of Reward-Conditioned Reinforcement Learning with Energy-based Models
Wenhao Ding*,
Tong Che*,
Ding Zhao,
Marco Pavone
International Conference on Machine Learning (ICML) 2023, Hawaii
arXiv / code / bibtex
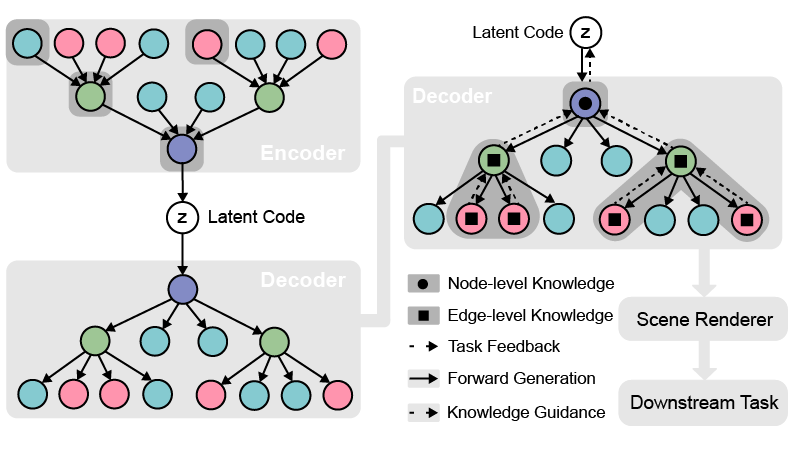
Semantically Adversarial Scene Generation With Explicit Knowledge Guidance
Wenhao Ding,
Haohong Lin,
Bo Li,
Ding Zhao
IEEE Transactions on Intelligent Transportation Systems (T-ITS), Feb, 2025
Learning to View: Decision Transformers for Active Object Detection
Wenhao Ding,
Nathalie Majcherczyk,
Mohit Deshpande,
Xuewei Qi,
Ding Zhao,
Rajasimman Madhivanan,
Arnie Sen
IEEE International Conference on Robotics and Automation (ICRA) 2023, London
arXiv / code / bibtex
A Survey on Safety-Critical Driving Scenario Generation -- A Methodological Perspective
Wenhao Ding,
Chejian Xu,
Mansur Arief,
Haohong Lin,
Bo Li,
Ding Zhao
IEEE Transactions on Intelligent Transportation Systems (T-ITS), March, 2023
Generalizing Goal-Conditioned Reinforcement Learning with Variational Causal Reasoning
Wenhao Ding,
Haohong Lin,
Bo Li,
Ding Zhao
Conference on Neural Information Processing Systems (NeurIPS) 2022, New Orleans
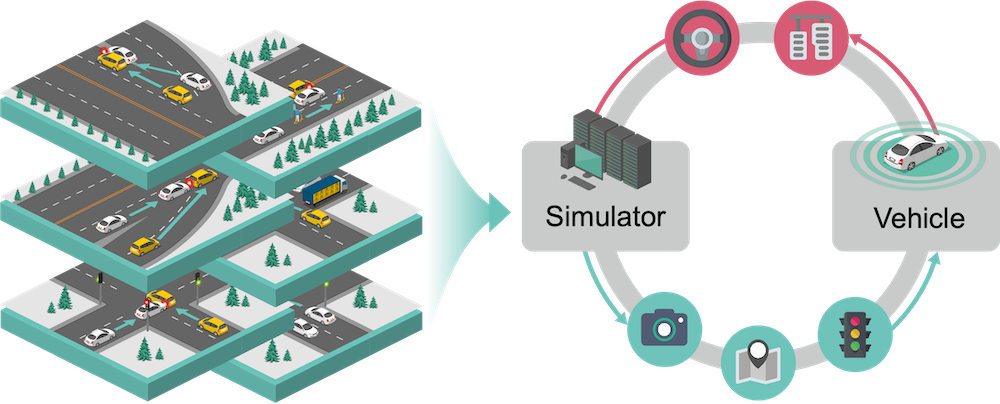
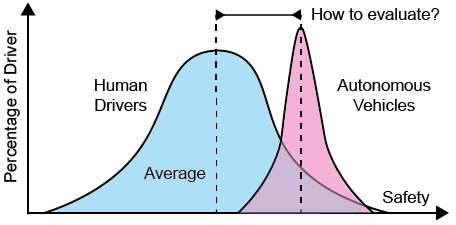
SafeBench: A Benchmarking Platform for Safety Evaluation of Autonomous Vehicles
Chejian Xu*,
Wenhao Ding*,
Weijie Lyu,
Zuxin Liu,
Shuai Wang,
Yihan He,
Hanjiang Hu,
Ding Zhao,
Bo Li
Conference on Neural Information Processing Systems (NeurIPS) 2022, New Orleans
CausalAF: Causal Autoregressive Flow for Safety-Critical Driving Scenario Generation
Wenhao Ding,
Haohong Lin,
Bo Li,
Ding Zhao
Conference on Robot Learning (CoRL) 2022, New Zealand
Abridged in ICML 2022 Workshop on Safe Learning for Autonomous Driving
Multimodal Safety-Critical Scenarios Generation for Decision-Making Algorithms Evaluation
Wenhao Ding,
Baiming Chen,
Bo Li,
Kim Ji Eun,
Ding Zhao
IEEE Robotics and Automation Letters (RA-L) with ICRA 2021, Xi'an
Academic Services
Conference Reviewer: ICML, ICLR, NeurIPS, AISTATS, CVPR, ECCV, ICCV, CoRL, ICRA, IROS, IJCAI, ICASSP, ITSC, ICME
Journal Reviewer: TMLR, T-RO, IEEE RA-L, IEEE TNNLS, IEEE T-ITS, IEEE T-IV, IEEE Access, IEEE MM, Scientific Report